Starting up the ACCESS robot software
1. Switch on all readers and robots
Make sure all Tecan readers and the liquid handling robot are connected to the PC, are on and at rest (i.e. not shaking!)
Open the Yeast_Grower program (Yeast_Grower is the working name of ACCESS)
Wait for the program to start up, do not use the mouse during the startup.
2. Select Instruments in Operation
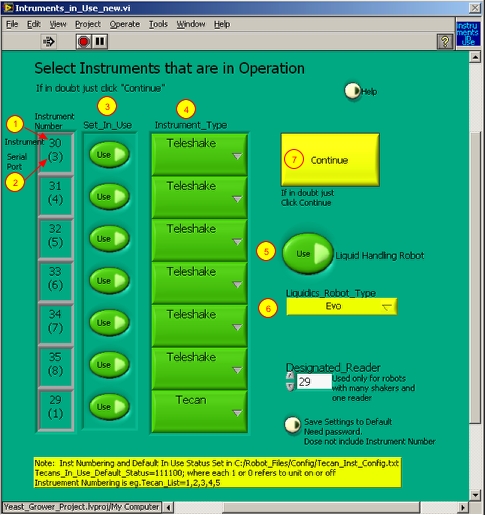
1. gives the instrument number
2. the serial port number to which the reader is connected (as defined in C:\Robotfiles\Config_Files\Tecan_Init_Ports.txt)
3. click to set in use or off (see next steps)
4. Select Teleshake or Tecan
5. Select use or off for liquid handling robot
6. Select liquid robot type (see next steps for example)
7. Continue initialization
NOTE: if unsure, press continue and use program default settings.
3. Reader type and Set_in_Use
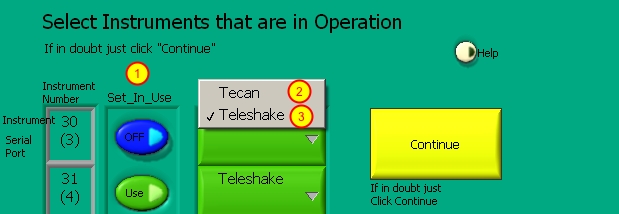
1. If a reader is not present, set to OFF.
2. Set the type of plate incubator to Tecan reader.
3. Set the type of plate incubator to Teleshake.
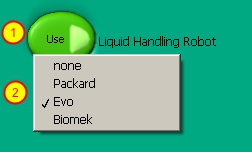
4. Set robot use and type
5. Start up remarks
− If there is an error while starting up, check that all readers are indeed at rest (manually open the door and look inside). If not wait 15 minutes for the shaking to stop.
− Close the Yeast_Grower software ( Click Red button “Close_Yeast_Grower at top right )
- Switch the reader off and then back on and restart Yeast_Grower software.
- If this is a new instrument to be added or a new installation of Yeast_Grower check if the serial ports are connected and if each instrument is assigned the correct “Port Number” in C:\Robot_Files\Config_Files\Tecan_Inst_Config.txt
NOTE: future versions of YG will have on-the-fly install/uninstall of reader instruments.
6. Main ACCESS interface description
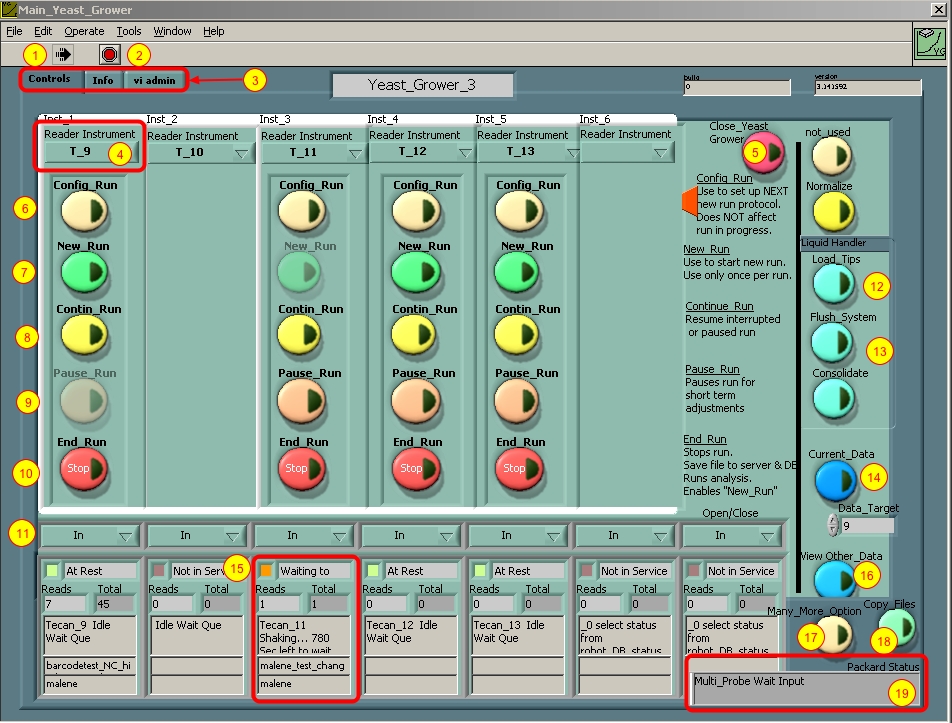
1. Black arrow indicates the software is running. A white arrow indicates software has closed, click on the arrow to restart software.
2. Use to close unresponsive program only as action of LAST resort. Please try button 4 first and be patient.
NOTE: If you do have to force quit – exit/close the yg window completely and check in the Windows Task Manager window that yeast_grower.exe is not running.
3. Tab control to switch to other sub-windows – not needed in normal operation.
4. Plate Reader Instrument name heading. Buttons in the column below operate on this instrument.
5. Close_Yeast_Grower button. Use to shutdown yeast_grower.
6. Config_Run button. Use to configure the NEW run for that instrument
7. New_Run button. Start a new run if button is not greyed out and previous run finished
8. Contin_Run button If run is user paused this will continue the run.
9. Pause_Run. If instrument is shaking it will pause the run at the end of the shaking /read cycle.
10. Stop_Run . If the instrument is shaking it will stop the run at the end of the shaking /read cycle, initiate auto data analysis and send data up to yeast_track database. Clicking the Stop_Run button will allow the New_Run button (7) to be used again.
11. Move Plate In/out drop down menu. Click to open or close the plate tray.
12. Load_Tips button. Click to bring up liquid handling robot load tips script.
13. Flush_System button. Run Flush_System liquid to purge liquid handling robot of air in the lines that may have accumulated.
NOTE: Flush_System is auto-run every 6 hours if there has been no other liquid handling robot activity
14. Current_Data button. View data currently acquiring or last acquired by instrument selected in Data_Target number drop down menu
15. Reader instrument Status Windows (see step below for details)
16. View_Other_Data button. View data from previous runs.
17. More_Options button. Open interface to access to many more yeast_grower functions.
18. Copy_Files button. Copy files to server and yeast_track database
19. Liquid handling robot tasks and status.
7. Reader Instrument Status windows -detailed view
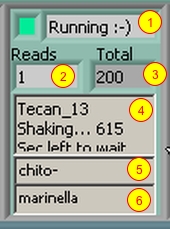
1. At_Rest, Running :-), Not in Service. If all instruments are At_Rest/Idle then you can use button 5 in previous step to close down yeast_grower.
2. Reads completed
3. Total reads configured for this run
4. Status/action messages
5. Data file name. Click to see full name
6. User name or owner of run